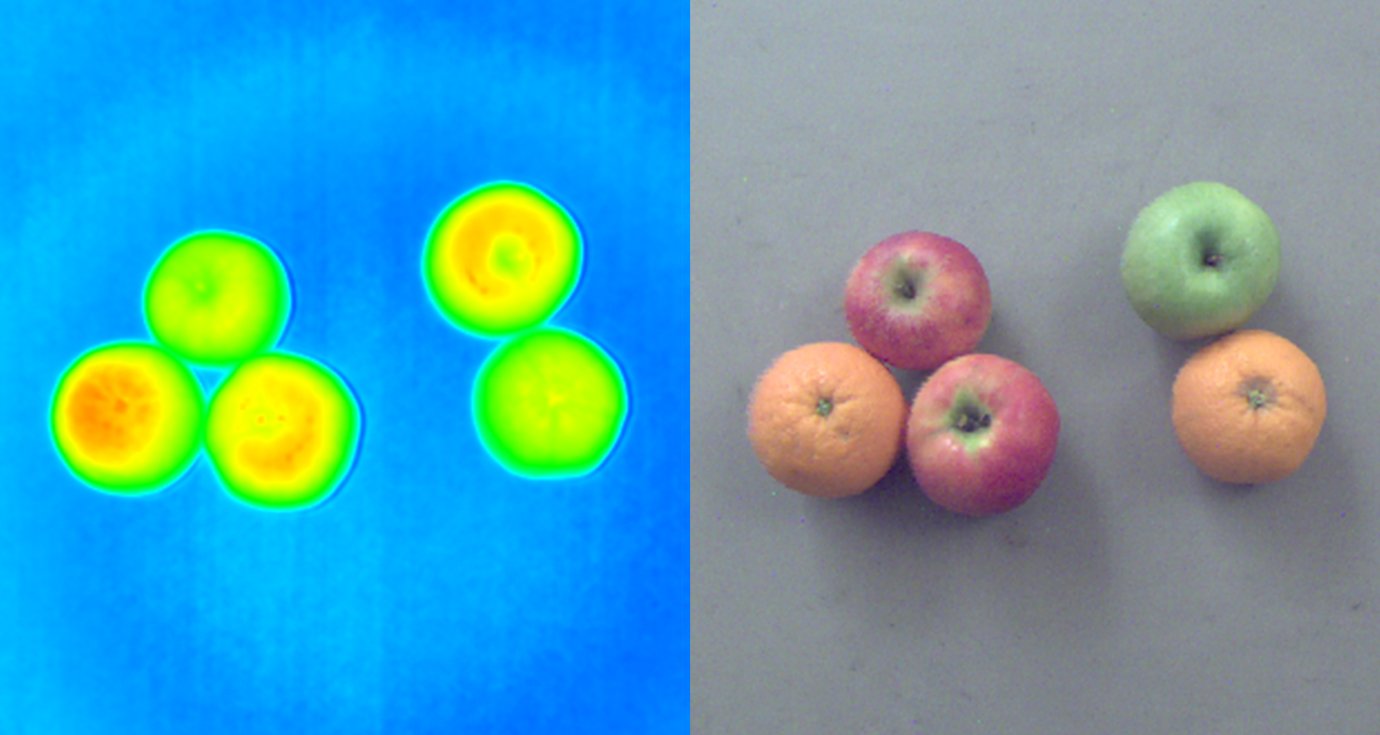
La caméra Basler Blaze fournit des données 3D sous forme de carte de profondeur ou de nuage de points. Un nuage 3D contient les coordonnées 3D x,y,z pour chaque pixel du capteur.
Pour une évaluation conviviale, les points sont souvents affichés en couleurs arc-en-ciel (rainbow color mapping). Les valeurs de profondeur proches apparaissent du rouge au jaune, les valeurs élognées du vert au bleu.